
SATT(Self-Adjusting Top Tree)学习笔记
前言
SATT ,即 Self-Adjusting Top Tree,是 2005 年 Tarjan 和 Werneck 在他们的论文《Self-Adjusting Top Trees》中提出的一种基于 Top Tree 理论的维护完全动态森林的数据结构。
前置知识:Splay 。
笔者第一次写博客,试图将 SATT 讲的通俗易懂,如果发现哪里讲错了也欢迎指出。
目录
$ \texttt{1.问题引入 } $
$ \texttt{2.树收缩} $
$\ \ \ \ \texttt{2.1 Compress \& Rake } $
$\ \ \ \ \texttt{2.2 簇} $
$\ \ \ \ \texttt{2.3 Top Tree } $
$\texttt{3. Self-Adjusting Top Tree }$
$\ \ \ \ \texttt{3.1 原理 } $
$\ \ \ \ \texttt{3.2 结构} $
$ \texttt{4.代码实现} $
$\ \ \ \ \texttt{4.1 Push 类函数} $
$\ \ \ \ \texttt{4.2 Splay 类函数} $
$\ \ \ \ \texttt{4.3 Access 类函数} $
$\ \ \ \ \texttt{4.4 Link \& Cut} $
$\ \ \ \ \texttt{4.5 完整代码(Luogu\ P3690 【模板】动态树)} $
$ \texttt{5.时间复杂度证明}$
$\ \ \ \ \texttt{5.1 势能分析} $
$\ \ \ \ \ \ \ \ \texttt{5.1-1 势能分析引入} $
$\ \ \ \ \ \ \ \ \texttt{5.1-2 Splay 复杂度证明} $
$\ \ \ \ \texttt{5.2 SATT 复杂度证明}$
$ \texttt{6.例题} $
$ \texttt{7.参考资料 } $
1.问题引入
维护一个森林,支持如下操作:
删除,添加一条边,保证操作前后仍是一个森林。
整体修改某棵树上的某条简单路径(表现为将这条路径上的每个点都打上某个标记)。
整体修改以某个点为根的子树。
整体询问某棵树上的某条简单路径(如询问点的权值和)。
整体询问以某个点为根的子树。
2.树收缩
在本章中对 簇,Top Tree 等概念的表述以《Self-Adjusting Top Trees》中的 表述为准。
2.1 Compress & Rake
对于任意一棵树,我们都可以运用树收缩理论来将它收缩为一条边。
具体地,树收缩有两个基本操作:Compress 和 Rake,Compress 操作指定一个度为二的点 $x$,与这个点相邻的那两个点记为 $y$,$z$,我们连一条新边 $yz$;将点 $x$ ,边 $xz$ ,边 $xy$ 的信息放到 $yz$ 中储存,并删去它们。
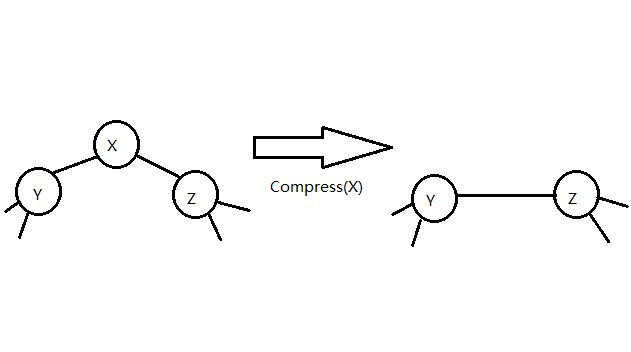
如图 1-1 ,为 Compress 操作。
Rake 操作指定一个度为一的点 $x$ ,这个点的邻点 $ y$ 的度数需大于一,设点 $y$ 有一个邻点 $z (x \neq z)$,我们将点 $x$ ,边 $xy$ 的信息放入 边 $yz$ 中储存,并删去它们。
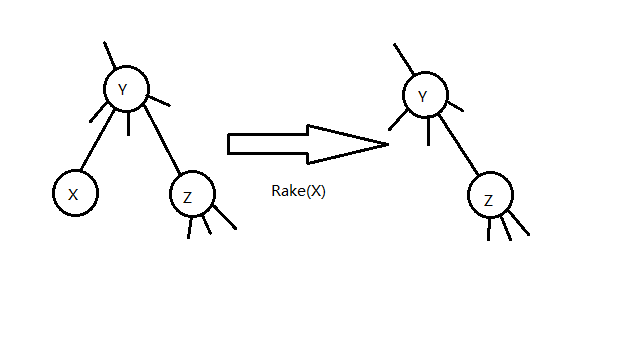
如图 1-2 ,为 Rake 操作。
不难证明,任何一棵树都可以只用 compress 操作 和 rake 操作来将它收缩为一条边。

如图 1-3 ,为 一棵树通过一系列 Compress 、Rake 操作收缩为一条边。
2.2 簇
为了表达方便,我们记在进行任何操作之前的原树为 $T$ 。在对 $T$ 进行某些树收缩操作(可以不做任何操作)之后的树记为 $T_x$。
我们研究 某个 $T_x$ 中某一条边所包含的信息情况。
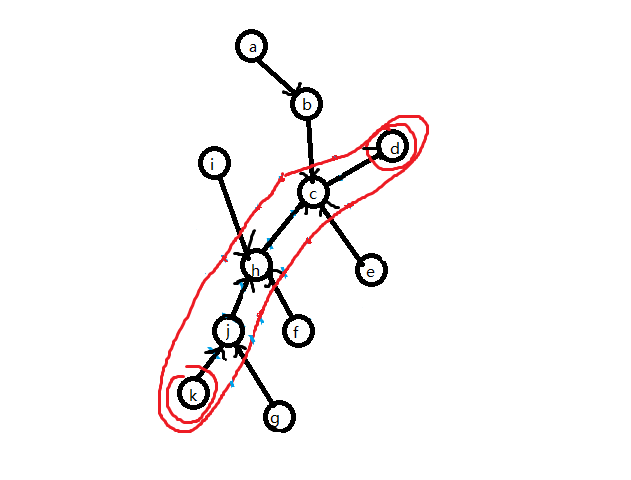
这条边除了带有它本身的信息(当然,如果这条边在 $T$ 中不存在,这条边就没有“本身的”信息)之外,还可能包含其它通过 compress,rake 操作合并到它上面的点,边的信息。我们不妨先从图1-3中的树收缩过程中选取一条边,看看它所包含的信息在 $T$ 中代表哪些点,边。
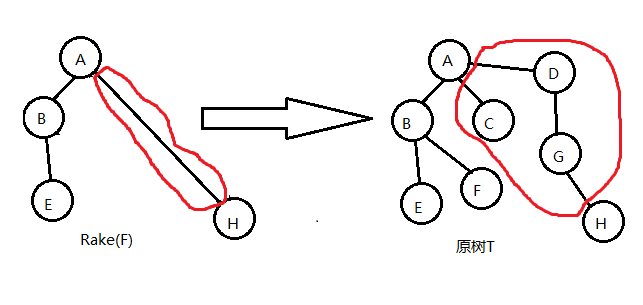
如图 1-4 ,选取的边和对应的图已用红线圈出。
可以看出,这条边所包含的信息在 $T$ 中代表的点,边是连通的(这些点,边组成了一个连通子图)。我们可以推及,对于任一 $T_x$ 中的任一条边储存的信息在 $T$ 中总体现为一个连通子图。我们将这样的连通子图称为簇(cluster)。
然而,簇是不完整的,它包含的某些边的端点不被它自己包含。于是我们将这些端点称作簇的端点(endpoint),将它包含的那些连通子图的点称作内点 (internal node),连通子图的边称作内边。
对于任意一个簇,都有以下性质:
簇只维护内点和内边的信息。
簇有两个端点。这两个端点即为 $T_x$ 中代表那个簇的边相连的那两个点。两个端点之间的路径我们称之为簇路径(cluster path) ;记两个端点分别为 $x$,$y$ ,我们用 $ C(x,y) $ 来表示这个簇(在不同的 $T_x$ 中可能会有多个这样的簇)。
内点仅与端点或内点相连,端点可能与非簇点相连。
特别地,对于 不做任何操作的 $T_x$(即为 $T$ ) 中的每条边,其对应的簇只包含代表它的边,这种簇我们称之为 “基簇”(base cluster) 。对于由 $T$ 收缩到只有一条边的最终的 $T_x$,$T_x$中的那条边代表的簇包含除了两个端点之外的整棵 $T$ 的信息,这个簇我们称之为 根簇(root cluster)。
如图 1-4,上文提到的基簇已用红线圈出。
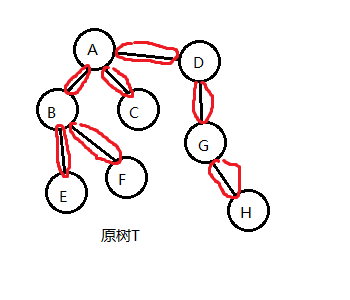
从簇的视角来看Compress,Rake 操作,我们发现这两个操作会将两个簇“合二为一”,剩下一个新簇,所以树收缩的过程也是所有的基簇合并为一个簇的过程。
所以我们也可以得到图1-5,它是与图1-3对应,对一系列树收缩操作的另一表示。

如图 1-5 ,树收缩过程的另一种表述。
2.3 Top Tree
我们现在想表示某一棵树进行树收缩的全过程。
根据上文,可以用图 或图 里的方法来表示这一过程,但这样十分麻烦,如果树收缩进行了 $n$ 步,我们就要用 $n$ 棵树来表示整个树收缩。
考虑一个对某棵树进行某一树收缩的更简便表示,我们引入 Top Tree。
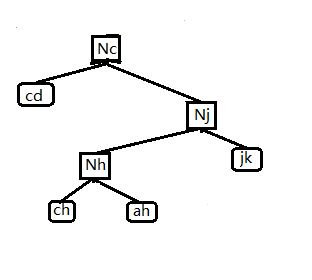
如图1-6,为以图 1-3 的收缩方法和原树为基础的一棵 Top Tree。
Top Tree 有以下性质;
一棵 Top Tree 对应一棵原树和一种树收缩的方法,Top Tree 的每个节点都表示在某个 $T_x$ 中的某一条边,也就是树收缩过程中形成的某一个簇。图中的形如 $N_x$ 的点表示 $compress(x)$ (意义见 2-1)这一操作形成的簇。
Top Tree 中的一个节点有两个儿子(都分别代表一个簇),这个节点代表的簇是这两个簇通过 compress 或 rake 操作合并得到的新簇。
Top Tree 的叶子节点是基簇,其根节点是根簇。因此我们按一棵 Top Tree 的拓扑序分层,它的每一层就代表了一棵 $ T_x $。
3.Self-Adjusting Top Tree
3.1 原理
先要说明一下,这里的 Self-Adjusting Top Tree 与 Tarjan 的原初版本有所不同:没有用到 unit tree 理论,导致最终整棵 SATT 的形态,操作方面有些差异。此外,这篇文章直接将 SATT “三度化”了,并不考虑维护树的一些更精细的结构。
Top Tree 对树收缩过程的极大简化 使我们看到通过维护树收缩过程来维护树上信息的可能性,SATT即是通过这一原理来维护树上信息的。
注意到树收缩的过程也是树上信息不断加入的过程,我们执行一次 $compress(x)$,$x$ 点的信息从此刻起就开始在簇中出现,影响着我们的统计结果。
假如我们现在用 top tree 来维护某棵树 $T$,树上的每个点,边都有权值,我们要维护的是 $T$ 的权值和。(不考虑统计不到端点的问题)
现在我们在维护时要对 $T$ 中某个点 $x$ 的权值进行修改,很明显,我们就需要更改 top tree 中所有簇信息包含 $x$ 的节点信息,这样做显然单次时间复杂度是 $ O(n) $ 级别的。
然而,如果我们选的点它在 top tree 中簇信息包含 $x$ 的节点个数很少,也就是说使它的信息尽可能晚地加入簇中,我们单次时间复杂度就会有一个很大的提升。

如图 2-1 ,为上文内容的图片说明。
SATT 就是通过修改 某个点/某条路径 在树收缩过程中信息被加入簇中的先后顺序来维护树上信息的。
3.2 实际结构
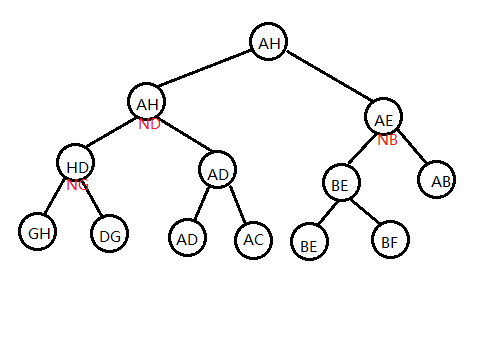
我们先将一棵原树 $T$ 分层定根,然后我们考虑对某种树收缩顺序的 top tree 的 根簇,它有两个端点,我们令这其中一个端点就是原树的根,另一个端点任选。
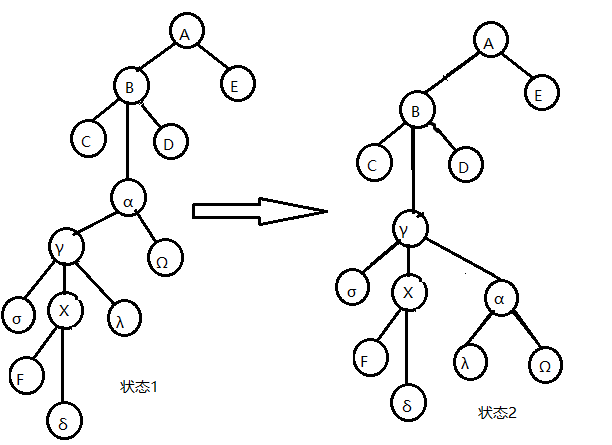
如图 2-2,给根簇选出一组端点,这里标注簇时将端点也圈进去了。
由树收缩的基本操作(2-1)可知,簇路径上的点,边 $(j,h,c,jh,hc)$ 的信息最后是通过 compress 操作才加入 $C(k,g)$ 的,而的非簇路径点 $(a,b,i,f,g,e,ig,\cdots)$ 是通过 rake 操作才加入 $C(k,g)$ 的。
我们将簇路径单独拿出来,这是一条形态特殊(为链)的树,我们为这棵树建出一棵改动后的 top tree(其代表的树收缩顺序任意)。
如图2-3,上述的 top tree 。
我们将这一结构称之为 compress tree,因为在这棵 top tree 中任一个点的两个儿子之间是通过 compress 操作来合并成它们的父亲。
compress tree 里的节点称为 compress node。只考虑当前这条簇路径,一个 非叶子的 compress node(必是 $ compress(x) $ ) 就代表一次 compress 过程,表示将左儿子和右儿子信息合并起来,再将这个 $compress(x)$ 本身存储的点 $x$ 信息加入。这棵 compress tree 就维护了 $C(k,g)$ 簇路径的信息。
另外,在 compress tree 中,我们实际上还对使用的 top tree 做了一些限制,因为注意到 compress tree 维护的是一个 $T$ 中深度两两不同的链,所以我们规定在 compress tree 中元簇的中序遍历顺序对应的 $T$ 中边的深度是一致的,且中序遍历越小深度越浅。同样,对于每个点 $x$ 对应的 $compress(x)$ 的关系 也是如此。
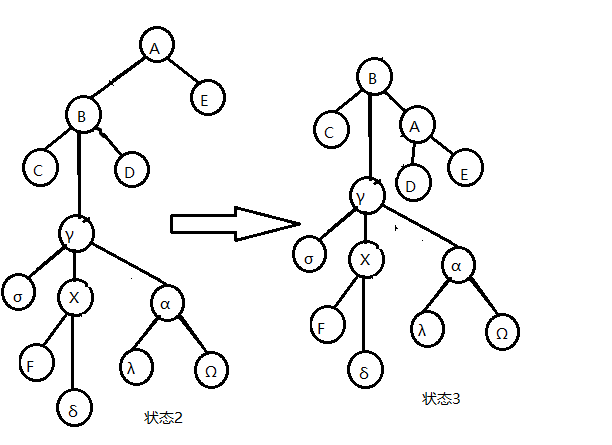
现在来维护那些非簇路径的信息,我们假设这些 非簇路径上的点 ,边已经形成了一个个极大簇,而这些极大簇是由这些用蓝线圈出的更小簇 rake 形成的,对由一些更小簇合并形成一个极大簇的过程,我们用一个三叉树来表示,类似的,我们称这一结构为 rake tree,对应地 rake tree 里的点就是 rake node。rake node 里面的点都代表一个簇,是由左儿子和右儿子 rake 到其 中儿子代表的更小簇上形成的(不考虑 rake 操作加入 $T$ 中某个点信息的问题)。具体可见下图,可知 rake tree 中的每个点都代表了 $T$ 中具有相同端点的更小簇。
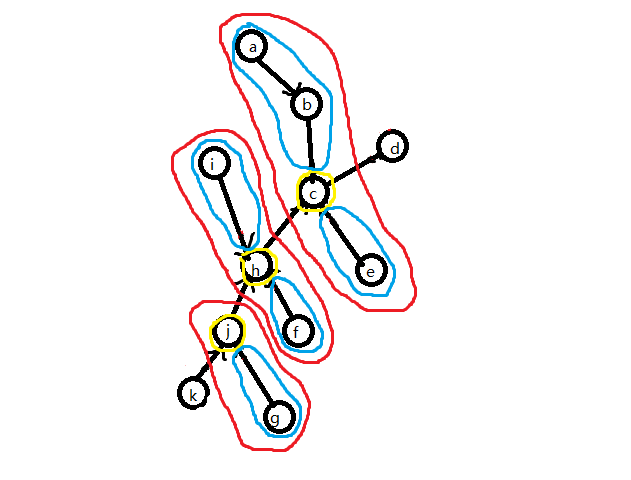
如图2-3,蓝线圈出的是一个个极大簇,黄线圈出的是一个个更小簇。
对于那些更小簇,我们对它们进行相同处理,给它们选择簇路径、建出 compress tree $\cdots$ 如此递归下去,就建出了许多表示树收缩过程的 compress tree,rake tree。
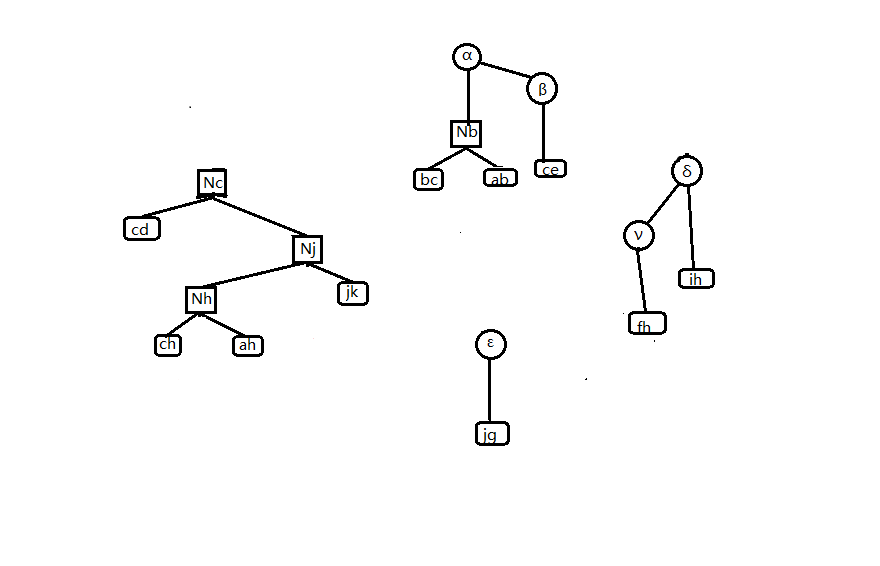
如图2-4,为原树的 rake-compress tree(因为rake node 连着一棵 compress tree,所以表现为一棵 rake tree 连着许多 compress tree 的形态)和代表根簇路径的 compress tree。
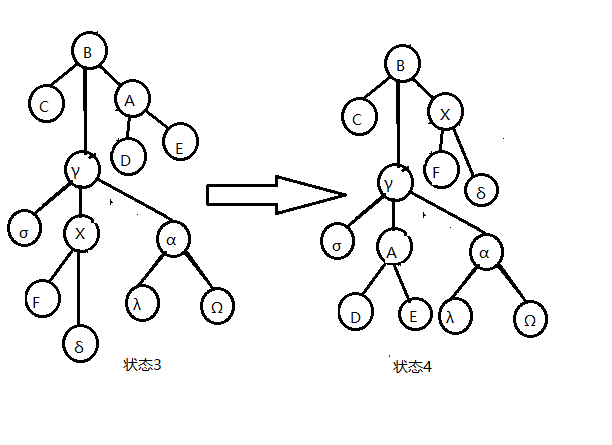
考虑将这些树以某种方式拼接在一起,使它们形成一个有序的整体。记一个 rake tree 代表的最小簇的集合的公共端点是 点 $x$。我们给这些 rake node 的中儿子(一个 compress tree 集合)都加入非 $x$ 的另一端点,但仍保持其中序遍历和 top tree 的基本性质。
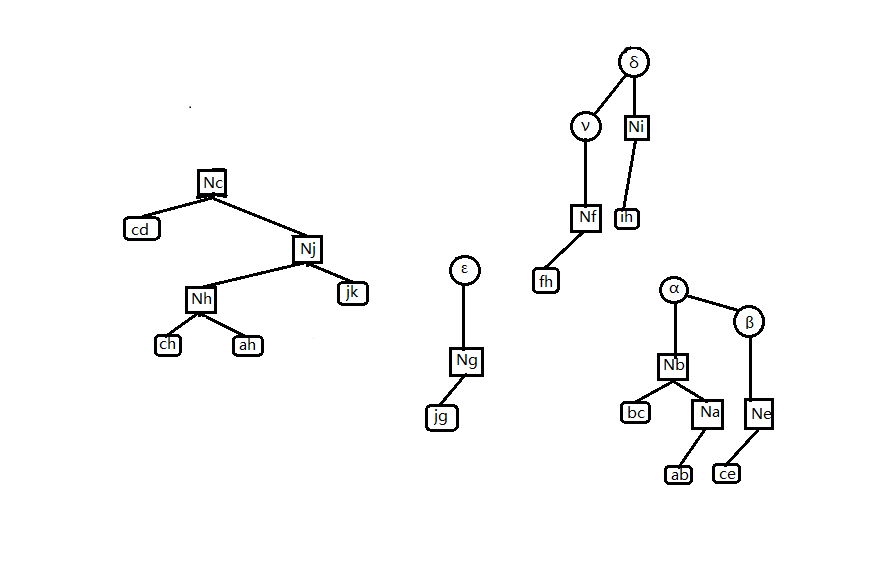
如图 2-5,对图 2-4 进行了上述修改。
这一步相当于是让 rake 操作加入某个 $T$ 中点的操作直接发生在 compress tree 中,这不仅是我们能 正确维护 rake node 的信息(只需将三个儿子信息合并即可),还使我们 compress tree 的结构更“完整”。下一步,我们将 compress tree 改为三叉树,若某个 rake tree 的公共端点是 点 $x$ 我们就将 rake tree 挂在 $compress(x)$ 的中儿子处。
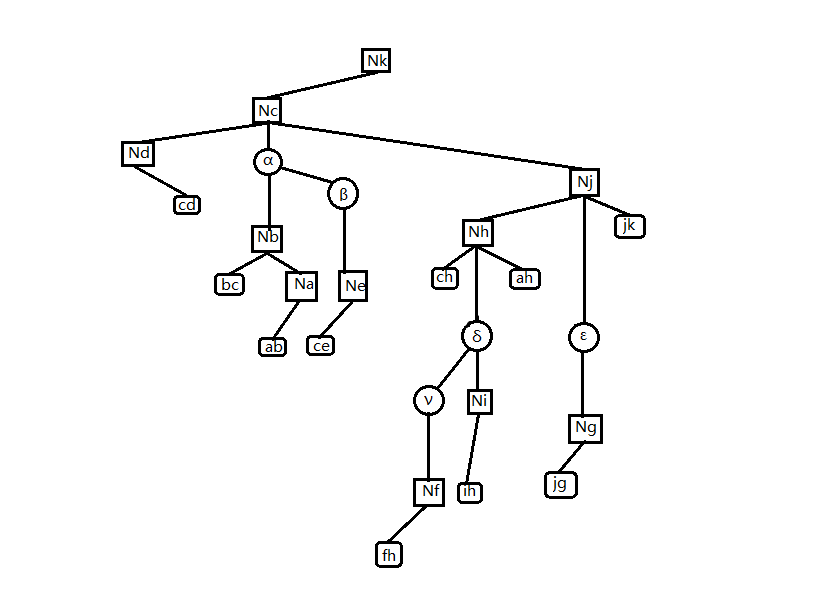
如图2-6,对图2-5进行了上述修改。
此时经过三叉化的 $compress(x)$ 点,它的意义就变成先将其中儿子 rake 到簇路径上,再统计左右儿子 和点 $x$ 的信息。
最后,我们再处理一下根簇路径的那棵 compress tree:与其它所有 compress tree 一致的,按中序遍历加入它的两个端点,使得 它的根储存整棵 $T$ 的信息。
于是我们就得到了一棵 Self-Adjusting Top Tree。
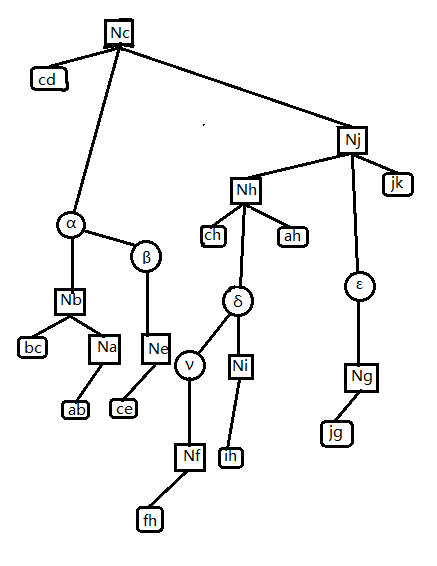
如图2-7,为一棵 Self-Adjusting Top Tree 。
总结一下,SATT 有以下性质:
SATT 由 compress tree 和 rake tree 组成,compress tree 是一棵特殊的 top tree;rake tree 是一个三叉树,它们都对应一棵树进行树收缩的过程。
compress node 里的点最多有三个儿子,非叶 compress node 可以任意旋转(保持 compress node 中儿子不变)。
rake tree 里的点一定有一个中儿子,rake node 可以任意旋转(保持 rake node 中儿子不变)。
SATT 的拓扑序反映了原树 $T$ 的树收缩顺序。
我们在 3-1 部分提到的“修改 某个点/某条路径 在树收缩过程中信息被加入簇中的先后顺序”SATT是否能实现呢,答案是肯定的。
在SATT中,有一个 access 的操作,它的作用是使某点 $x$ 在 $T$ 中成为根簇的非根端点,同时在 SATT 中使 $ compress(x) $ 成为 SATT 的根。
我们可以通过 access 操作以均摊 $O(log n)$ 的复杂度使 SATT 中代表 $compress(x)$ 的点旋到整棵 SATT 的树根,根据 SATT 的第四个性质,我们改变了$ compress(x) $的操作顺序,使得它最晚执行,$x$ 点的信息也就被最晚加入;这样当我们要修改 $x$ 点的信息时,就只需要更新 $compress(x)$ 。
4.代码实现
4.1 Push类函数
Pushup
在考虑对 SATT 的某个节点维护信息时,首先分这个点在 compress tree 还是在 rake tree 进行讨论,原因可见上文,不再赘述,下面以维护某个点的子树大小为例
// ls(x) x的左儿子
// rs(x) x的右儿子
// ms(x) x的中儿子
// type==0 是 compress node
// type==1 是 rake node
void pushup(int x,int type){
if(type==0)size[x]=size[rs(x)]+size[ms(x)]+1;
else size[x]=size[rs(x)]+size[ms(x)]+size[ls(x)];
return;
}查询点$x$的子树大小,就将其 access 到 SATT 根,答案是其中儿子的 size $+1$ ;因为根据上文,在 access 之后,其中儿子才是它的真子树。
Pushdown
我们如果要对原树中的某个子树做整体修改,一个很自然的想法是:将这个节点直接 access 到 SATT 根节点,给它的中儿子打上一个标记即可。同理,查询子树就直接 access 后查询中儿子。
我们如果要对原树中的某条路径做整体修改,我们就 $expose$ 路径的两个端点,其中 $expose(x,y)$ 是使 点 $x$ 成为了 $T$ 的根节点,使点 $y$ 成为了根簇的另一个端点。对应在 SATT 上,此时根簇 的 compress tree 就是 $x$ 到 $y$ 的路径。于是直接给根簇的 compress tree 打上一个标记即可。同理查询链 $expose$ 后查询根节点即可。
于是我们就知道问题引入的问题怎么做了。。
void pushdown(int x,int type){
if(type==0){
//deal with chain
chain[ls(x)]+=chain[x];
chain[rs(x)]+=chain[x];
val[ls(x)]+=chain[x];
val[rs(x)]+=chain[x];
//deal with subtree
subtree[ls(x)]+=subtree[x];
subtree[rs(x)]+=subtree[x];
subtree[ms(x)]+=subtree[x];
val[ls(x)]+=subtree[x];
val[rs(x)]+=subtree[x];
val[ms(x)]+=subtree[x];
subtree[x]=0;
}
else{
subtree[ls(x)]+=subtree[x];
subtree[rs(x)]+=subtree[x];
subtree[ms(x)]+=subtree[x];
val[ls(x)]+=subtree[x];
val[rs(x)]+=subtree[x];
val[ms(x)]+=subtree[x];
subtree[x]=0;
}
return;
}
//下传标记
void pushall(int x,int type){
if(!isroot(x))pushall(father[x],type);
pushdown(x,type);
return;
}4.2 Splay 类函数
我们知道 SATT 中的 rake tree 和 compress tree 都是可以旋转的,也就是说它们可以用 Splay 来维护。因此我们可以写出以下代码:
// ls 一个SATT节点的左儿子
// rs 一个SATT节点的右儿子
// ms 一个SATT节点的中儿子
// type==1 在rake tree中
// type==0 在compress tree中
bool isroot(int x){return rs(father[x])!=x&&ls(father[x])!=x;}//是一个节点的中儿子或无父亲
bool direction(int x){return rs(father[x])==x;}
void rotate(int x,int type){
int y=father[x],z=father[y],d=direction(x),w=son[x][d^1];
if(z)son[z][ms(z)==y?2:direction(y)]=x;
son[x][d^1]=y;son[y][d]=w;
if(w)father[w]=y;
father[y]=x;father[x]=z;
pushup(y,type);pushup(x,type);
return;
}
void splay(int x,int type,int goal=0){
pushall(x,ty);/*下传标记*/
for(int y;y=father[x],(!isroot(x))&&y!=goal;rotate(x,ty)){
if(father[y]!=goal&&(!isroot(y))){
rotate(direction(x)^diretion(y)?x:y,type);
}
}
return;
} 值得注意的是,direction 和 isroot 与普通 Splay 的不同。
因为无论你把这个点怎么转,这个点的中儿子是不会变的。
4.3 Access 类函数
access 函数意义是:将点 $x$ 旋转到整个 SATT 的根处,使点 $x$ 成为根簇的两个端点之一(另一端点即为 $T$ 的根节点),同时不能改变原树的结构和原树的根。
为了实现 access ,我们先将其旋转到其所在 compress tree 的树根,再把点$x$的右儿子“去掉”,使点 $x$ 成为其所在 compress tree 对应簇的端点。
if(rs(x)){
int y=new_node();
setfather(ms(x),y,0);
setfather(rs(x),y,2);
rs(x)=0;
setfather(y,x,2);
pushup(y,1);pushup(x,0);
}如果这时点 $x$ 已经到了根部,则退出;若没有,则执行以下步骤,以让它跨过它上面的 rake tree :
将其父亲节点(一定是一个 rake node ), splay 到其 rake tree 的树根;
将 $x$ 的爷节点(一定是一个 compress node)splay 到其 compress tree 根部。
若 $x$ 的爷节点有一个右儿子,则将点x和爷节点的右儿子互换,更新信息,然后退出。
若爷节点没有右儿子,则先让点 $x$ 成为爷节点的右儿子,此时点 $x$ 原来的父节点没有中儿子,根据上文 rake node 的性质,它不能存在。于是调用
Delete函数,将其删除,然后退出。1,2两个步骤合称为 local splay。3,4两个步骤合称为 splice。但我们方便起见,将它们都写在
splice函数里。
上文提到的 Delete 函数是这样的:
检视将要删除的点 $x$ 有没有左儿子,若有,则将左儿子的子树后继 splay 到点 $x$ 下方(成为新的左儿子),然后将右儿子(若有)变成左儿子的右儿子,此时点 $x$ 的左儿子就代替了点 $x$ 。(这相当于 splay 合并)
若没有左儿子,则直接让其右儿子代替点$x$。
不难发现, splice 无非就是改变了原树的一些状态的端点选取,不影响最终状态的簇维护的信息。我们接下来一次 splice 完了之后的 点 $x$ 的父亲节点当作新的 点 $x$ ,进行下一次 splice。
最终我们会发现 我们最开始要操作的点 $x$ 一定在 根簇的 compress tree 最右端。我们只需最后做一次 global splay,将其旋至 SATT 根部即可。
// ls 一个SATT节点的左儿子
// rs 一个SATT节点的右儿子
// ms 一个SATT节点的中儿子
//son[x][0] ls
//son[x][1] rs
//son[x][2] ms
// type==1 在rake tree中
// type==0 在compress tree中
int new_node(){
if(top){top--;return Stack[top+1];}
else return ++tot;
}
void setfather(int x,int fa,int type){
if(x)father[x]=fa;son[fa][type]=x;
return;
}
void Delete(int x){
setfather(ms(x),father[x],1);
if(ls(x)){
int p=ls(x);pushdown(p,1);
while(rs(p))p=rs(p),pushdown(p,1);
splay(p,1,x);
setfather(rs(x),p,1);
setfather(p,father[x],2);
pushup(p,1);pushup(father[x],0);
}
else setfather(rs(x),father[x],2);Clear(x);
}
void splice(int x){
/* local splay */
splay(x,1);int y=father[x];
splay(y,0);pushdown(x,1);
/* splice */
if(rs(y)){
swap(father[ms(x)],father[rs(y)]);
swap(ms(x),rs(y));
}
else Delete(x);
pushup(x,1);pushup(y,0);
return;
}
void access(int x){
splay(x,0);if(rs(x)){
int y=new_node();
setfather(ms(x),y,0);
setfather(rs(x),y,2);
rs(x)=0;
setfather(y,x,2);
pushup(y,1);pushup(x,0);
}
while(father[x]){
splice(father[x]);x=father[x];pushup(x,0);
}
splay(x,0)/*global splay*/
return;
}关于 makeroot:
若要让一个点成为原树的根,那么我们就将点 $x$ access 到 SATT 的根节点,可知此时点 $x$ 已经是最终状态的簇一个端点。由 compress tree 的中序遍历性质可知,将点 $x$ 所在的 compress tree 左右颠倒(所有点的左右儿子互换),就使点 $x$ 成为原树的根。在具体实现中,我们通过给点 $x$ 打上一个翻转标记,不停下传来进行这一过程。
void makeroot(int x){
access(x);
push_rev(x);
return;
}于是就有 expose :
void expose(int x,int y){
makeroot(x);
access(y);
return;
}4.4 Link & Cut
现在我们要将原树中两个不连通的点之间连一条边,则我们先将其中的一个点 $x$ $makeroot$,再将另一个点 $y$ $access$ 到根,可知此时应该使点 $y$ 成为点 $x$ 的右儿子,并在点 $y$ 的右儿子上挂上这一条边(在只需维护点的 SATT 中,这一步可省)。
void Link(int x,int y,int z){
/*z代表连接x,y的边*/
access(x);makeroot(y);
setfather(y,x,1);
setfather(z,y,0);
pushup(x,0);
pushup(y,0);
return;
} Cut 跟 link 原理差不多……
void cut(int x,int y){
expose(x,y);
clear(rs(x));/*删掉xy这一基簇。*/
father[x]=ls(y)=rs(x);
pushup(y,0);
}4.5 完整代码(Luogu P3690 【模板】动态树)
#include<bits/stdc++.h>
#define ls(x) T[x][0]
#define rs(x) T[x][1]
#define ms(x) T[x][2]
#define maxn 200005
using namespace std;
int read(){
int s=0;
char a=getchar();
while(!isdigit(a))a=getchar();
while(isdigit(a)){
s=(s<<1)+(s<<3);
s+=a^48;
a=getchar();
}
return s;
}
int T[maxn][3],s[maxn][2],tot,v[maxn],n,m,r[maxn],top,st[maxn],f[maxn];
int nnd(){
if(top){top--;return st[top+1];}
else return ++tot;
}
bool isr(int x){return rs(f[x])!=x&&ls(f[x])!=x;}
bool dir(int x){return rs(f[x])==x;}
void psu(int x,int ty){
if(ty){
s[x][1]=s[ls(x)][1]^s[rs(x)][1]^s[ms(x)][1];return;
}
s[x][0]=s[ls(x)][0]^v[x]^s[rs(x)][0];
s[x][1]=s[ls(x)][1]^s[ms(x)][1]^s[rs(x)][1]^v[x];
}
void psr(int x){if(!x)return;r[x]^=1;swap(ls(x),rs(x));}
void psd(int x,int ty){
if(ty)return;
if(r[x]){psr(ls(x));psr(rs(x));r[x]=0;return;}
}
void upd(int x,int ty){if(!isr(x))upd(f[x],ty);psd(x,ty); }
void stf(int x,int fa,int ty){if(x)f[x]=fa;T[fa][ty]=x;return;}
void rtt(int x,int ty){
int y=f[x],z=f[y],d=dir(x),w=T[x][d^1];
if(z)T[z][ms(z)==y?2:dir(y)]=x;
T[x][d^1]=y;T[y][d]=w;
if(w)f[w]=y;f[y]=x;f[x]=z;
psu(y,ty);psu(x,ty);
}
void spy(int x,int ty,int gl=0){
upd(x,ty);for(int y;y=f[x],(!isr(x))&&y!=gl;rtt(x,ty)){
if(f[y]!=gl&&(!isr(y)))rtt(dir(x)^dir(y)?x:y,ty);
}
}
void cle(int x){ls(x)=ms(x)=rs(x)=s[x][0]=s[x][1]=r[x]=v[x]=0;st[++top]=x; }
void del(int x){
stf(ms(x),f[x],1);
if(ls(x)){
int p=ls(x);psd(p,1);while(rs(p))p=rs(p),psd(p,1);
spy(p,1,x);stf(rs(x),p,1);stf(p,f[x],2);psu(p,1);psu(f[x],0);
}
else stf(rs(x),f[x],2);cle(x);
}
void spl(int x){
spy(x,1);int y=f[x];spy(y,0);psd(x,1);
if(rs(y)){
swap(f[ms(x)],f[rs(y)]);swap(ms(x),rs(y));psu(x,1);
}
else del(x);
psu(rs(y),0);psu(y,0);
}
void acs(int x){
spy(x,0);int ys=x;if(rs(x)){
int y=nnd();stf(ms(x),y,0);stf(rs(x),y,2);
rs(x)=0;stf(y,x,2);psu(y,1);psu(x,0);
}
while(f[x]){spl(f[x]);x=f[x];}spy(ys,0);
}
int fdr(int x){
acs(x);psd(x,0);while(ls(x))x=ls(x),psd(x,0);spy(x,0);return x;
}
void mkr(int x){acs(x);psr(x);}
void epo(int x,int y){mkr(x);acs(y);}
void lnk(int x,int y){
if(fdr(x)==fdr(y))return;
acs(x);mkr(y);stf(y,x,1);
psu(x,0);psu(y,0);
}
void cu(int x,int y){
epo(x,y);if(ls(y)!=x||rs(x))return;
f[x]=ls(y)=0;psu(y,0);
}
int main(){
int i,j,op,U,V,n=read(),m=read();tot=n;
for(i=1;i<=n;i++)v[i]=read(),psu(i,0);
for(i=1;i<=m;i++){
op=read();U=read();V=read();
if(op==0){epo(U,V);cout<<s[V][0]<<'\n';}
if(op==1)lnk(U,V);
if(op==2)cu(U,V);
if(op==3){acs(U);v[U]=V;psu(U,0);}
}
return 0;
}5.时间复杂度证明
5.1 势能分析
(如果你已经会势能分析了,你可以跳过 4.1 并直接看 4.2,或者自己证 SATT,%%%)
5.1-1 势能分析引入
在某个算法对于某一状态的某一操作中,定义这一次操作的均摊复杂度为:
$$ a = c + \varphi' - \varphi $$
其中 $c$ 是这一操作的实际复杂度,$\varphi$ 是在操作之前状态的势能,而 $\varphi'$ 是这一操作后状态的势能。
势能是我们人为定义的,我们令 $\varphi(x)$ 是状态 $x$ 的势能函数,势能函数的值仅与当前状态 $x$ 有关。上文中 $\varphi ,\varphi'$ 是 $\varphi(x),\varphi(x')$的缩写。
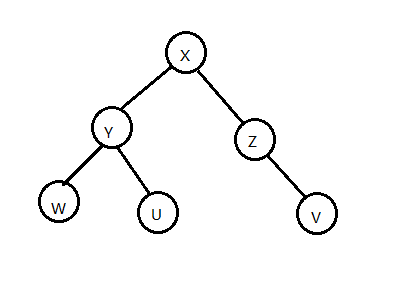
如图 4-1,为一棵有根树。
对于图中的有根树(点数 $n$ 等于 $6$),我们定义其势能函数 $\varphi(x)= \sum\limits_{i=1}^nr(i) $。
而 $r(x)=$ $\text{当前状态以 }x\text{ 为根的子树大小}$。

如图 4-2,为对上文有根树的进行一次操作后的状态。
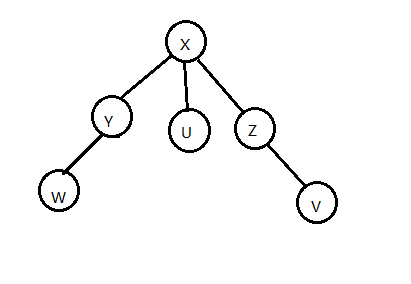
对于图 4-2 中的操作,我们知道这一操作的均摊复杂度为:
$$ \begin{aligned} a &= c + \varphi' - \varphi\\ &= 1+ \sum_{i=1}^{n}r'(i) - \sum_{i=1}^{n}r(i)\\ &= 1 \ + r'(Y)- r(Y)\\ &= 1+ 2-1\\ &= 2\\ \end{aligned} $$
(假设这一操作实际复杂度是 $1$)
对于一系列操作的均摊复杂度,我们将每次操作均摊复杂度累加起来即可。下面设 $ x_i $ 为第 $ i $ 次操作后的状态,特别的,初始状态为 $x_0$ 。
$$ \begin{aligned} \sum_{i=1}^m a_i &= \sum_{i=1}^m c_i + \sum_{i=1}^m(\varphi(x_i)-\varphi(x_{i-1}))\\ &= \sum_{i=1}^m c_i +\varphi(x_n) -\varphi(x_0)\\ \end{aligned} $$ 则有 $$\sum c =\sum a - \varphi(x_n) +\varphi(x_0)$$
我们很多时候在某一个算法中,并不能直接求出 $ \sum c $ 是多少,但我们可以构造势能函数 $\varphi$ ,并通过一系列放缩手段,得到
$$\sum a \leq \alpha$$
$$\varphi(x_0) - \varphi(x_n) \leq \gamma $$
中的 $ \alpha$ 和 $ \gamma$ 大小。
那么就有
$$\sum c \leq α + γ$$
进而分析出实际时间复杂度了。
(以上只是势能函数应用的一部分,本文对势能函数的应用定义也并不严格)
5.1-2 Splay 复杂度证明
Splay 的时间复杂度要用 势能分析 来证明。
我们先来分析将某个点旋至根的 splay 的复杂度。
设在一棵 splay(点数为 $n$)中,其当前状态 $ x $ 的势能函数为
$$\varphi(x)= \sum_{i=1}^{n}r(i)$$
其中 $r(i) = \lceil \log_2 (\text{以 } i \text{ 为根的子树大小}) \rceil $。
一次 splay 函数可能有 zig/zag ,zig-zig/zag-zag,zig-zag/zag-zig 操作,我们下面对这三种操作分别分析。
zig / zag

如图 4-3,为 splay 的 zig/zag 操作。
我们只分析 zig 的均摊复杂度,因为 zag 只是将它左右颠倒了一下,分析过程相同,同理,下文中也只分析 zig-zig ,zig-zag 的复杂度。
值得注意的是,下面都假设 zig,zig-zig,zig-zag 的实际复杂度为$1$。
由图,zig均摊复杂度 $$ \begin{aligned} a &= 1 + r'(X) - r(X) + r'(Y) - r(Y)\\ &\leq 1 + r'(X) - r(X)\\ &\leq 1 + 3(r'(X) - r(X))\\ \end{aligned} $$
我们就收缩到这一步,接下来分析 zig-zig 复杂度。
zig-zig / zag-zag
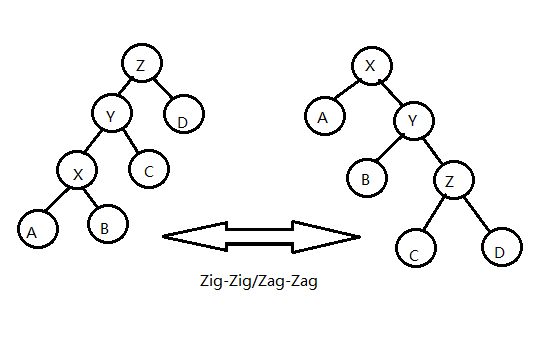
如图 4-4,为 splay 的 zig-zig\zag-zag 操作。
由图,zig-zig 的均摊复杂度
$$ a = 1 + r'(X) +r'(Y) +r'(Z) -r(X) -r(Y) -r(Z) $$
注意到 $ 2\lceil \log_2(a + b + c) \rceil - \lceil \log_2(a) \rceil - \lceil log_2(b) \rceil \ge 1\ \ ( a,b,c \ge1) $
所以有
$$1\leq 2r'(X) - r(X) -r(Z)$$
代回得
$$a \leq 3r'(X)- 2r(X) +r'(Z) +r'(Y) -r(Y) -2r(Z) $$
注意到
$$r(Y) \ge r(X),r(Z) \ge r'(Z),r(Z) \ge r'(Y)$$
则有
$$0 \leq r(Y) -r(X) +r(Z)-r'(Z)+ r(Z)-r'(Y)$$
相加得
$$a \leq 3(r'(X)-r(X))$$
这是一个理想的式子,化到这步为止。
zig-zag / zag-zig

如图 4-5,为 zig-zag 操作。
由图,zig-zag 操作的均摊复杂度
$$a = 1 + r'(X) +r'(Y) +r'(Z) -r(X) -r(Y) -r(Z) $$
我们想把它化成和 zig-zig 中形式一致的式子,于是仿照 zig-zig 里的化法
$$1\leq 2r'(X) - r'(Y) -r'(Z)$$
代回得
$$a \leq 3r'(X)- r(X) -r(Y) -r(Z) $$
显然有
$$r(Y) \ge r(X),r(Z) \ge r(X)$$
$$0 \leq r(Y) -r(X) +r(Z)-r(X)$$
相加得
$$a \leq 3(r'(X)-r(X))$$
我们就达到了目的。
总复杂度分析
我们知道一个点是按以上这三种操作顺序执行才旋至根部的,而且旋转过程中,至多只会发生一次 zig\zag 操作;令 $r(X_i)$ 为第 $i$ 次操作执行后的状态中点 $X$ 的 $r$ 值,总共执行了 $m$ 次三种操作。于是一次 splay 的总均摊复杂度为
$$ \begin{aligned} a &\leq 3\sum_{i=1}^m (r(X_i)-r(X_{i-1})) +1\
&\leq 3(r(X_m)-r(X_0)) +1 \end{aligned} $$
而由 $r(x)$ 的定义,最终有
$$a \leq 3\log\ n +1$$
我们现在来分析进行 $m$ 次 splay 操作的复杂度。
$$\sum_{i=1}^m a_i = \sum_{i=1}^m c_i + \varphi(x_n) -\varphi(x_0) $$
我们要求的是实际复杂度
$$\sum_{i=1}^m c_i = \sum_{i=1}^m a_i - \varphi(x_n) +\varphi(x_0) $$
由 $ \varphi(x) $ 的定义可知
$$\varphi(x_0) -\varphi(x_n) \leq nlogn$$
又由上文我们对一次 splay 复杂度的证明,知
$$\sum_{i=1}^m c_i \leq 3m \log n+m+n\log n $$
即证明了splay 复杂度的正确性。
对于 splay 以外的任何操作,我们都可以看作是常数复杂度或者给每次的旋转操作乘了个常数。对于后者,它使得每次 zig/zag 等操作实际复杂度不是 $1$。这似乎与我们在上文中的假设前提矛盾,但实际上这相当于给一次 splay 的复杂度乘了个常数;就以 zig-zig 操作为例,假如你现在每次 zig-zig 操作实际复杂度为 $2$。 $$ \begin{aligned} a &= 2 + r'(X) +r'(Y) +r'(Z) -r(X) -r(Y) -r(Z)\
&\leq 2(1 + r'(X) +r'(Y) +r'(Z) -r(X) -r(Y) -r(Z) )\ \end{aligned} $$ 发现只要做一样的分析即可。
5.2 SATT 时间复杂度证明
我们尝试将 splay 的成功经验搬到 SATT 上。
依然设在一棵 SATT(点数为$n$)中,其当前状态 $ x $ 的势能函数为
$$\varphi(x)= \sum_{i=1}^{n} r(i)$$
其中 $r(i) = \lceil \log_2 (\text{以 } i \text{ 为根的子树大小} ) \rceil $。
则SATT的 splay 的均摊复杂度显然仍是 $ 3n\log n + 1$,即使 SATT 是一个三叉树。
由splay 证完 splay 复杂度就能证得其它函数复杂度正确的经验可知,对于 SATT ,我们只要证得 access 函数复杂度正确,就能证得 SATT 的时间复杂度。
我们逐步分析 access 的均摊复杂度。
我们先要将点 $x$ 旋至 其所在 compress tree 的根,则这一步的均摊复杂度
$$ a \leq 3\log n +1 $$
接着我们要使点 $x$ 无右儿子,则这一步的均摊复杂度
$$ a = 1 + r'(\gamma)- 0 \leq \log n +1$$
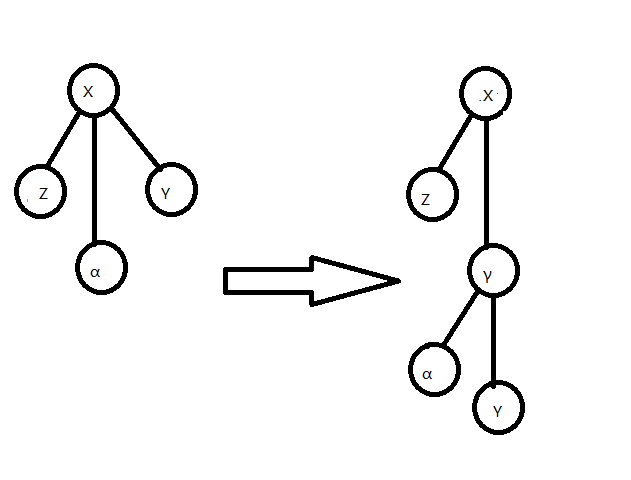
如图4-6 ,为去掉点 $x$ 的右儿子过程。
然后是 local splay ,splice 交替进行的过程,经过若干次 splice ,点 $x$ 被旋至 SATT 的根。我们对其中一组 local splay,splice 进行分析:
如图4-7,4-8,4-9,体现了对点 $x$ 做一次 splice的过程,不包括最后左旋点 $x$ 的部分。
为表达方便,设 $r_x(i)$为点 $i$ 在状态 $x$ 时的$r$值。
由图,易知由状态1到状态2的操作(将点 $x$ 的父亲旋至其 rake tree 的根部的 local splay 操作)的均摊复杂度
$$a \leq 3(r_2(\gamma)- r_1(\gamma))+1$$
由图,易知由状态 2 到状态 3 的操作(将点 $x$ 的爷节点旋至其 compress tree 的根部的 local splay 操作)的均摊复杂度
$$a \leq 3(r_3(B)- r_2(B))+1$$
重点分析由状态3到状态4的操作(splice )
$$a = r_4(\gamma) -r_3(\gamma) +1$$
不难发现 $r_4(\gamma) \leq r_3(B)$
故这一次操作的均摊复杂度为 $$ \begin{aligned} a &\leq r_3(B)- r_3(\gamma)+1\\ &\leq 3(r_3(B)- r_3(\gamma))+1\\ \end{aligned} $$
综合上述过程,一次 splice 的复杂度为
$$ a\leq 3r_3(B)+3r_3(B)+3r_2(\gamma)-3r_3(\gamma)-3r_2(B)-3r_1(\gamma)+3$$
记下一次 splice 的点 $X$(即状态4中的点$B$)的$r$值为$r'(X)$,并注意到
$$r_3(\gamma),r_1(\gamma) \ge r_1(X)$$
$$r_3(B),r_2(\gamma) \leq r'(X)\text{ 且 } r_3(B)=r_2(B)$$
所以
$$a\leq 9(r'(X)-r(X))+3$$
除了上面这个复杂度以外,在 splice 中可能还会有因 delete 产生的额外均摊复杂度,记这一部分为 $a' \leq 3\log n +1 $。
先不管 $a'$ 部分,与 splay 复杂度证明中一样的事情,每次 splice 的 $r'(X)$ 等于下一次的 $r(X)$ ,且第一次splice 的 $r(X)$ 等于我们一开始旋转点 $x$ 到其 compress tree 树根时的 $r(X)$ ,则对于不计 delete 的 一次 access 复杂度,我们有:
$$ a \leq 9(r'(x)-r(x))+ 3k + 1 $$
其中 $k$ 为 splice 次数。
看样子 $a$ 会带一个 $3k+1$ 导致均摊复杂度无法分析,但我们有办法来对付它,注意到 zig-zig\zig-zag 的旋转可以这么均摊 $$ \begin{aligned} a &\leq 3(r'(X)-r(X)) + q\\ &\leq 3(q-1)(r'(X)-r(X)) \end{aligned} $$
如果我们能“找到”足够多的 zig-zig,zig-zag 操作,我们就可以将这 $3k+1$ 平摊到 这些 操作上去,从而消掉 这个 $ 3k+1 $。
我们发现 globel splay 里面就有这么多的 zig-zig,zag-zig 来给我们使用,因为 globel splay 里面点的个数一定大于 $k$,而从点 $x$ 到 globel splay 根部路径的点数一定不少于 $k$ ,也就是说一次 access 中一定会至少有 $\dfrac k2$ 个 zig-zag 操作,算上 globel access 的均摊复杂度 $a \leq 3\log n +1$,一次 access 不记 delete 的均摊复杂度为 $$ \begin{aligned}
a &\leq 9(r'(X)-r(X)) + 3k + 1 + 18(r''(X)-r'(X)) -S+1 +3 \log n +1,S \ge 3k\
&a\leq 18(r''(X)-r(X)) +2 +3\log n+1\ &a\leq 21(r''(X)-r(X)) +3\
\end{aligned} $$
现在算上 $a'$,像证明 splay 复杂度那样列出进行 $m$ 次 access 操作的总式子。
$$\sum_{i=1}^m a_i' + \sum_{i=1}^m a_i = \sum_{i=1}^m c_i + \varphi(x_n) -\varphi(x_0) $$
我们要求的是实际复杂度
$$\sum_{i=1}^m c_i = \sum_{i=1}^m a_i +\sum_{i=1}^m a_i' - \varphi(x_n) +\varphi(x_0) $$
$$\sum_{i=1}^m c_i \leq \sum_{i=1}^m a_i' + 21m\log n +n\log n +3m $$
注意到 delete 操作的本质是删掉一个 rake node ,但我们在 $m$ 次操作中最多只会添加 $m$ 个 rake node,由 rake node 的定义,我们初始时最多有 $n$个 rake node,也就是说 我们总共只会做 $m+n$ 次 delete 操作,由 $a' \leq 3\log n +1 $可知
$$\sum_{i=1}^m c_i \leq 3(m+n)\log n + 21m\log n +n\log n +4m +n$$
所以我们就证明了 access 的复杂度,而其他函数只不过是常数因子,所以我们就证明了 SATT 的复杂度。
顺便一提,如果你像写 LCT 一样省略 global splay 的过程,改为在每次 splice 时直接将要 access 的点旋转一下,这样做复杂度大概也是对的,我认为可以套用 《QTREE解法的一些研究 》这篇文章里面证明 LCT 时间复杂度的方法。(实测省略 global splay 的版本要快很多,能与LCT 在 Luogu P3690 跑得不分上下。。。)
6.例题
CF1192B Dynamic Diameter
维护动态直径,建出 SATT 后,我们只需要在 pushup 里面维护每个点的答案,最后查询根节点的答案(即整棵树的直径)就可以了。
void pushup(int x,int op){
if(op==0){
/*是compress node*/
len[x]=len[ls(x)]+len[rs(x)];
diam[x]=maxs[ls(x)][1]+maxs[rs(x)][0];
diam[x]=max(diam[x],max(maxs[ls(x)][1],maxs[rs(x)][0])+maxs[ms(x)][0]);
diam[x]=max(diam[x],max(max(diam[ls(x)],diam[rs(x)]),diam[ms(x)]));
maxs[x][0]=max(maxs[ls(x)][0],len[ls(x)]+max(maxs[ms(x)][0],maxs[rs(x)][0]));
maxs[x][1]=max(maxs[rs(x)][1],len[rs(x)]+max(maxs[ms(x)][0],maxs[ls(x)][1]));
}
else{
/*是rake node*/
diam[x]=maxs[ls(x)][0]+maxs[rs(x)][0];
diam[x]=max(diam[x],maxs[ms(x)][0]+max(maxs[ls(x)][0],maxs[rs(x)][0]));
diam[x]=max(max(diam[x],diam[ms(x)]),max(diam[ls(x)],diam[rs(x)]));
maxs[x][0]=max(maxs[ms(x)][0],max(maxs[ls(x)][0],maxs[rs(x)][0]));
}
return;
}其中 diam 是当前点的答案(这个点代表的簇的直径)。len 表示当前 compress node 所在簇路径的长度,$ maxs_{0/1} $ 表示 compress node 到簇内点和端点的不选簇路径儿子/不选父亲的最大距离(如果是 rake node 则只存储选取当前簇的上端点到簇内点和端点的最大距离 $maxs_0$)。每次查询 SATT 根节点的 diam 即可,正确性显然。
注意对 pushrev 做一些改动。
void pushrev(int x){
if(!x)return;
r[x]^=1;
swap(ls(x),rs(x));
swap(maxs[x][0],maxs[x][1]);
return;
}[CSP-S2019] 树的重心
假如我们能动态 $O(\log n)$ 维护树的重心,我们就做出这个题了。
SATT 支持动态 $O(\log n)$ 维护树的重心,做到这需要非局部搜索(non-local search)。
对于一种树上的性质,如果一个点/一条边在整棵树中有这种性质,且在所有包含它的子树中都包含此种性质,我们就称这个性质是局部的(local),否则称它是非局部的(non-local)。局部信息一般可以只通过 pushup 来维护
例如,权值最小值是局部的,因为一个点/一条边如果在整棵树中权值最小,那么在所有包含它的子树中它也是权值最小的,而权值第二小显然就是非局部的。
我们上文维护的 diam 也是局部信息。
回到正题,重心显然是一个非局部信息,无法通过简单的 pushup 来维护。我们考虑在 SATT 上搜索:
我们的搜索从 SATT 的根节点,即根簇开始。注意到重心有很好的性质:假如有一条边的一侧点的个数大于等于另一侧点的个数,那么边的这一侧一定至少有一个重心(重心可能有 $2$ 个)。
记 $sum$ 表示某一个簇的点个数,$maxs$ 为一棵 rake tree 的所有 rake node 中儿子的 $sum$ 最大值。
void pushup(int x,int op){
if(op==0){
/*是 compress node*/
sum[x]=sum[ls(x)]+sum[rs(x)]+sum[ms(x)]+1;
}
else{
/*是 rake node*/
maxs[x]=max(maxs[ls(x)],max(maxs[rs(x)],sum[ms(x)]));
sum[x]=sum[ls(x)]+sum[rs(x)]+sum[ms(x)];
}
return;
}现在我们在根簇
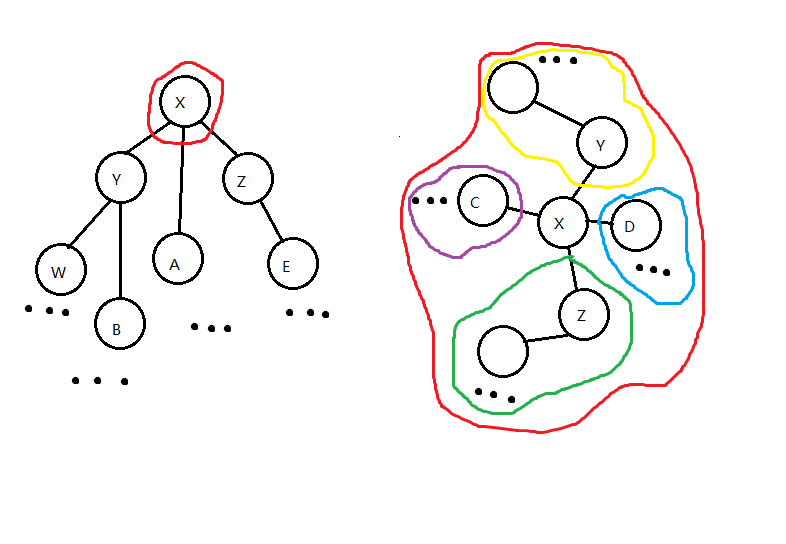
如图6-1,为在进行 non-local search 时的 SATT 和对应的 原树 $T$。
我们做如下比较:
比较 簇 $compress(Y)$ 的 $sum$ 值与 簇 $compress(Z)$ 、簇 $A$ 和点 $X$ 的并(我们暂称为簇 $α$ )的 $sum$ 值。若 $compress(Y)$ 的 $sum$ 值大于等于后者,说明至少有一个重心在 $compress(Y)$ 的子树中,我们递归到 $compress(Y)$ 搜索。(如果此处取等,点 $X$ 也是一个重心,需要记录)
比较 簇 $compress(Z)$ 的 $sum$ 值与 簇 $compress(Y)$ 、簇 $A$ 和点 $X$ 的并(我们暂称为簇 $β$ )的 $sum$ 值。若 $compress(Z)$ 的 $sum$ 值大于等于后者,说明至少有一个重心在 $compress(Z)$ 的子树中,我们递归到 $compress(Z)$ 搜索。(如果此处取等,点 $X$ 也是一个重心,需要记录)
比较 点 $x$ 中儿子 rake tree 之中 $sum$ 最大的更小簇(见3-2)的 $sum$ 值与 簇 $compress(Y)$ 、簇 $A$ 、点 $X$ 及其它更小簇的并(我们暂称为簇 $γ$ )的 $sum$ 值,若 那个更小簇 的 $sum$ 值大于等于后者,说明至少有一个重心在 那个更小簇的 子树中,我们递归到它搜索。(如果此处取等,点 $X$ 也是一个重心,需要记录)
若以上比较都不递归,则点 $X$ 一定是一个重心,记录并退出。
第一步的搜索显然正确,之后应该怎么搜呢?
假如我们递归到 $Y$ ,则现在 $Y$ 储存信息的并不完整,因为 $compress(Y)$ 里面只存储了它自己这个簇的信息,而我们要求的是整棵树的重心。解决方法是,将之前簇的信息记录下来,在点 $Y$ 上比较计算时将上一个簇的信息与 点 $Y$ 自己的信息合并处理。具体实现如下:
void non_local_search(int x,int lv,int rv,int op){
/*lv 和 rv 都是搜索的上一个簇的信息*/
if(!x)return;psd(x,0);
if(op==0){
if(maxs[ms(x)]>=sum[ms(x)]-maxs[ms(x)]+sum[rs(x)]+sum[ls(x)]+lv+1+rv){
if(maxs[ms(x)]==sum[ms(x)]-maxs[ms(x)]+sum[rs(x)]+sum[ls(x)]+lv+1+rv){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(ms(x),sum[ms(x)]-maxs[ms(x)]+sum[rs(x)]+sum[ls(x)]+1+lv+rv,0,1);return;
}
if(ss[rs(x)]+rv>=ss[ms(x)]+ss[ls(x)]+lv+1){
if(ss[rs(x)]+rv==ss[ms(x)]+ss[ls(x)]+lv+1){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(rs(x),sum[ms(x)]+1+sum[ls(x)]+lv,rv,0);return;
}
if(sum[ls(x)]+lv>=sum[ms(x)]+sum[rs(x)]+1+rv){
if(sum[ls(x)]+lv==sum[ms(x)]+sum[rs(x)]+1+rv){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(ls(x),lv,rv+sum[ms(x)]+1+sum[rs(x)],0);return;
}
}
else{
if(maxs[ls(x)]==maxs[x]){non_local_search(ls(x),lv,rv,1);return;}
if(maxs[rs(x)]==maxs[x]){non_local_search(rs(x),lv,rv,1);return;}
non_local_search(ms(x),lv,rv,0);
return;
}
if(ans1)ans2=x;else ans1=x;return;
}完整代码如下:
#include<bits/stdc++.h>
#define ls(x) T[x][0]
#define rs(x) T[x][1]
#define ms(x) T[x][2]
#define maxn 1000005
using namespace std;
int read(){
int s=0;
char a=getchar();
while(!isdigit(a))a=getchar();
while(isdigit(a)){
s=(s<<1)+(s<<3);
s+=a^48;
a=getchar();
}
return s;
}
int T[maxn][3],tot,n,m,r[maxn],top,st[maxn],f[maxn],maxs[maxn],ss[maxn];
int nnd(){
if(top){top--;return st[top+1];}
else return ++tot;
}
bool isr(int x){return rs(f[x])!=x&&ls(f[x])!=x;}
bool dir(int x){return rs(f[x])==x;}
void psr(int x){if(!x)return;r[x]^=1;swap(ls(x),rs(x));}
void psd(int x,int ty){
if(ty)return;
if(r[x]){psr(ls(x));psr(rs(x));r[x]=0;return;}
}
void psu(int x,int op){
psd(x,op);/*不知道哪没 psd*/
if(op==0){
ss[x]=ss[ls(x)]+ss[rs(x)]+ss[ms(x)]+1;
}
else{
maxs[x]=max(maxs[ls(x)],max(maxs[rs(x)],ss[ms(x)]));
ss[x]=ss[ls(x)]+ss[rs(x)]+ss[ms(x)];
}
return;
}
void upd(int x,int ty){if(!isr(x))upd(f[x],ty);psd(x,ty); }
void stf(int x,int fa,int ty){if(x)f[x]=fa;T[fa][ty]=x;return;}
void rtt(int x,int ty){
int y=f[x],z=f[y],d=dir(x),w=T[x][d^1];
if(z)T[z][ms(z)==y?2:dir(y)]=x;
T[x][d^1]=y;T[y][d]=w;
if(w)f[w]=y;f[y]=x;f[x]=z;
psu(y,ty);psu(x,ty);
}
void spy(int x,int ty,int gl=0){
upd(x,ty);for(int y;y=f[x],(!isr(x))&&y!=gl;rtt(x,ty)){
if(f[y]!=gl&&(!isr(y)))rtt(dir(x)^dir(y)?x:y,ty);
}
}
void cle(int x){ls(x)=ms(x)=rs(x)=ss[x]=r[x]=maxs[x]=f[x]=0;st[++top]=x; }
void del(int x){
stf(ms(x),f[x],1);
if(ls(x)){
int p=ls(x);psd(p,1);while(rs(p))p=rs(p),psd(p,1);
spy(p,1,x);stf(rs(x),p,1);stf(p,f[x],2);psu(p,1);psu(f[x],0);
}
else stf(rs(x),f[x],2);cle(x);
}
void spl(int x){
spy(x,1);int y=f[x];spy(y,0);psd(x,1);
if(rs(y)){
swap(f[ms(x)],f[rs(y)]);swap(ms(x),rs(y));
}
else del(x);psu(x,1);psu(y,0);rtt(rs(y),0);
}
void acs(int x){
spy(x,0);if(rs(x)){
int y=nnd();stf(ms(x),y,0);stf(rs(x),y,2);
rs(x)=0;stf(y,x,2);psu(y,1);psu(x,0);
}
while(f[x])spl(f[x]);
}
void mkr(int x){acs(x);psr(x);}
void epo(int x,int y){mkr(x);acs(y);}
void lnk(int x,int y){acs(x);mkr(y);stf(y,x,1);psu(x,0);}
void cu(int x,int y){epo(x,y);f[x]=ls(y)=0;psu(y,0);}
int ans1,ans2;
void non_local_search(int x,int lv,int rv,int op){
if(!x)return;psd(x,0);
if(op==0){
if(maxs[ms(x)]>=ss[ms(x)]-maxs[ms(x)]+ss[rs(x)]+ss[ls(x)]+lv+1+rv){
if(maxs[ms(x)]==ss[ms(x)]-maxs[ms(x)]+ss[rs(x)]+ss[ls(x)]+lv+1+rv){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(ms(x),ss[ms(x)]-maxs[ms(x)]+ss[rs(x)]+ss[ls(x)]+1+lv+rv,0,1);return;
}
if(ss[rs(x)]+rv>=ss[ms(x)]+ss[ls(x)]+lv+1){
if(ss[rs(x)]+rv==ss[ms(x)]+ss[ls(x)]+lv+1){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(rs(x),ss[ms(x)]+1+ss[ls(x)]+lv,rv,0);return;
}
if(ss[ls(x)]+lv>=ss[ms(x)]+ss[rs(x)]+1+rv){
if(ss[ls(x)]+lv==ss[ms(x)]+ss[rs(x)]+1+rv){
if(ans1)ans2=x;else ans1=x;
}
non_local_search(ls(x),lv,rv+ss[ms(x)]+1+ss[rs(x)],0);return;
}
}
else{
if(maxs[ls(x)]==maxs[x]){non_local_search(ls(x),lv,rv,1);return;}
if(maxs[rs(x)]==maxs[x]){non_local_search(rs(x),lv,rv,1);return;}
non_local_search(ms(x),lv,rv,0);
return;
}
if(ans1)ans2=x;else ans1=x;return;
}
int qu[maxn],qv[maxn];
int main(){
int i,TT=read(),n,I,U,V,x;long long ANS;
for(I=1;I<=TT;I++){
n=read();tot=n;ANS=0;
for(i=1;i<=n;i++)ss[i]=1;
for(i=1;i<=n-1;i++){
qu[i]=U=read();qv[i]=V=read();lnk(U,V);
}
for(i=1;i<=n-1;i++){
cu(qu[i],qv[i]);
ans1=0;ans2=0;non_local_search(qu[i],0,0,0);
ANS+=ans1+ans2;
if(ans1)acs(ans1);if(ans2)acs(ans2);
ans1=0;ans2=0;non_local_search(qv[i],0,0,0);
ANS+=ans1+ans2;
if(ans1)acs(ans1);if(ans2)acs(ans2);
lnk(qu[i],qv[i]);
}
cout<<ANS<<'\n';
for(i=1;i<=tot;i++)T[i][0]=T[i][1]=T[i][2]=ss[i]=r[i]=maxs[i]=f[i]=0;
tot=top=0;
}
return 0;
}7.参考资料
1.《Self-Adjusting Top Trees Robert》E. Tarjan, Renato F. Werneck。
2.negiizhao的博客(%%论文哥)
3.zhengrunzhe的sone1题解(%%zhengrunzhe)
 鄂公网安备 42010202000505 号
鄂公网安备 42010202000505 号